Selecting the right robotic gripper is a critical decision in the world of automation and robotics. The choice of gripper can significantly impact the performance, efficiency, and versatility of a robotic system. Whether it’s for manufacturing, logistics, or research applications, making an informed decision in gripper selection is essential to achieving optimal results in robotic operations. In this post, I am going to present the different robotic gripper types that are available for engineering applications with more focus on food manipulation tasks since it’s among the most challening tasks.
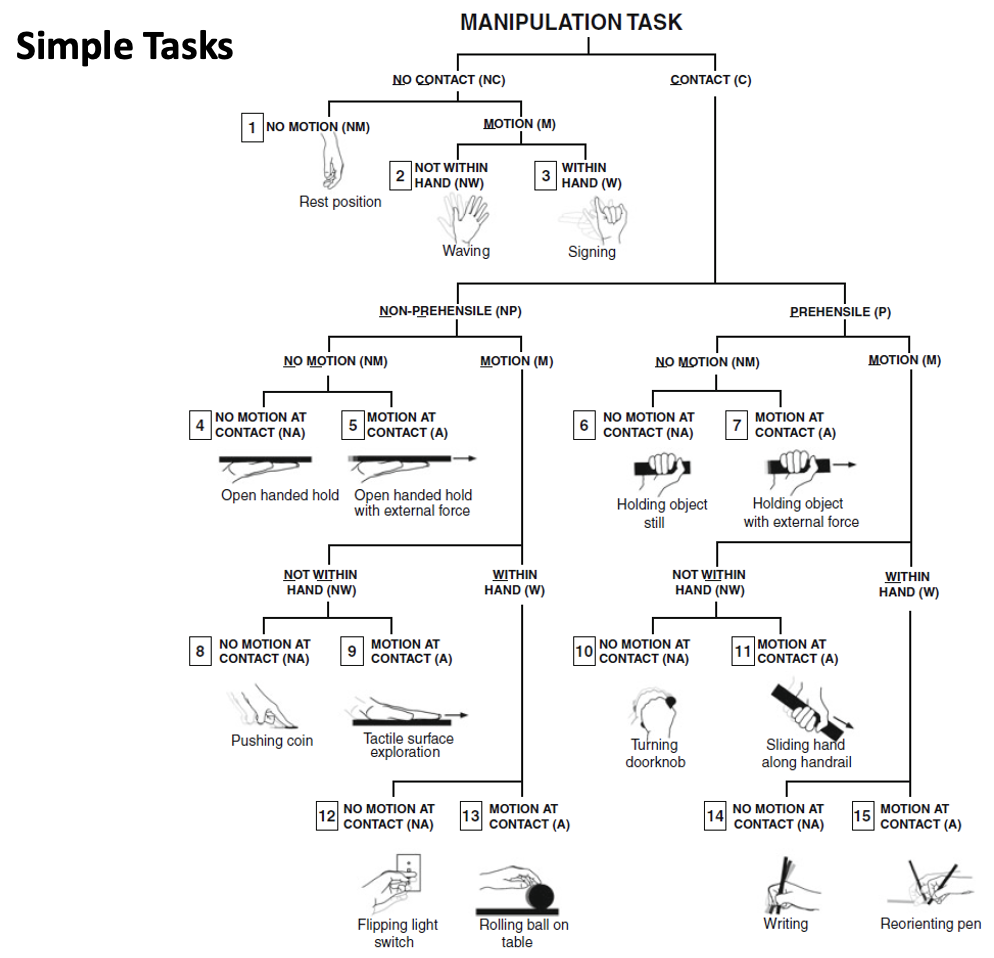
Human Manipulation Taxonomy
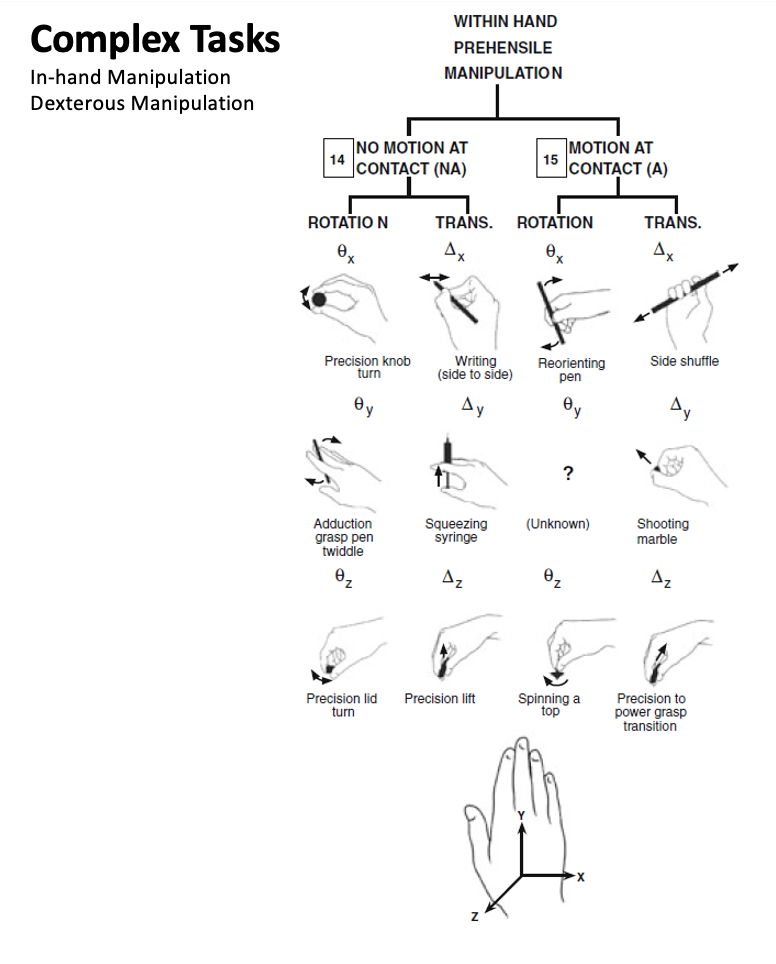
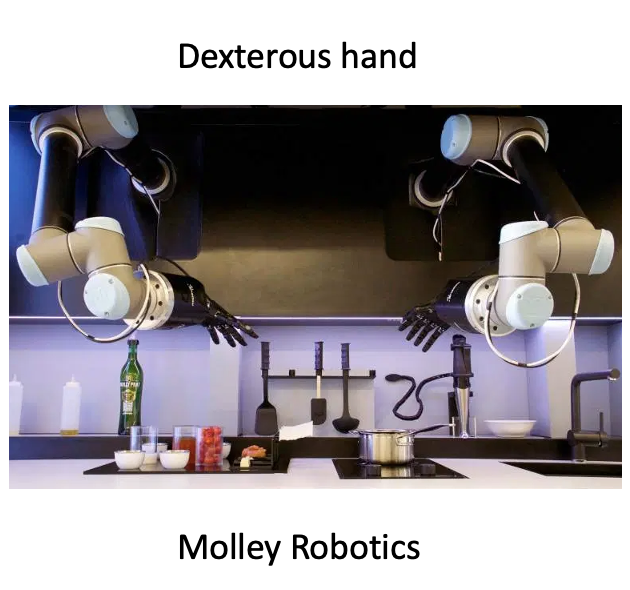
Dexterous Grippers for Complex Tasks

Other grippers for Simple Tasks
- Gripper Types:
- Suction
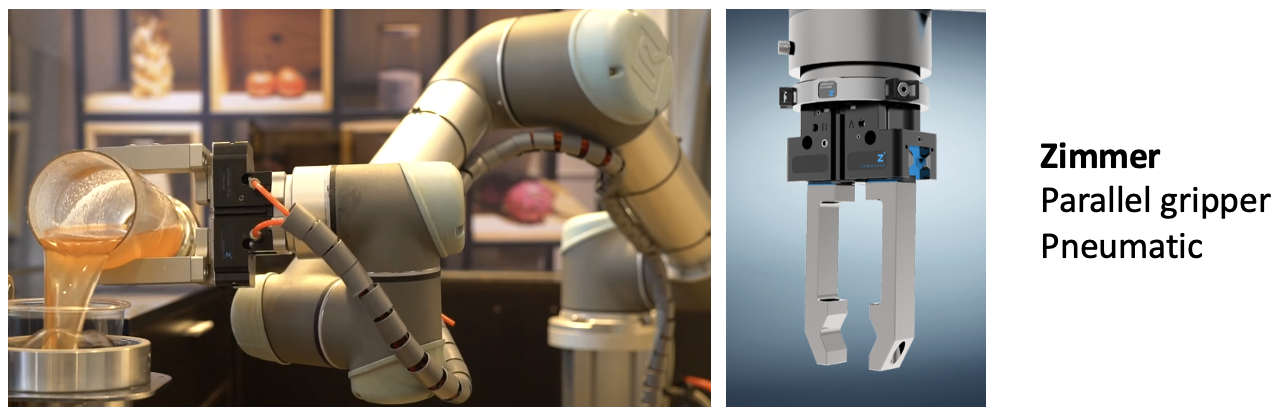
- Parallel
- Angular
- Magnetic
-
Drive Type:
- Mechanical
- Passive Joints
- Pneumatic
- Magnetic

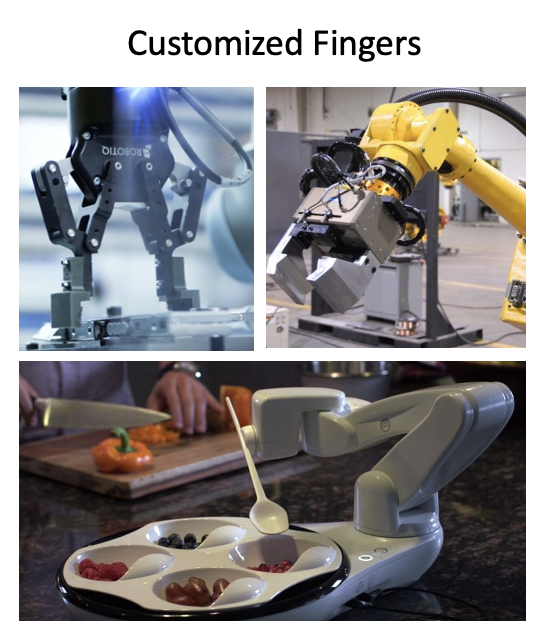
Options for finger
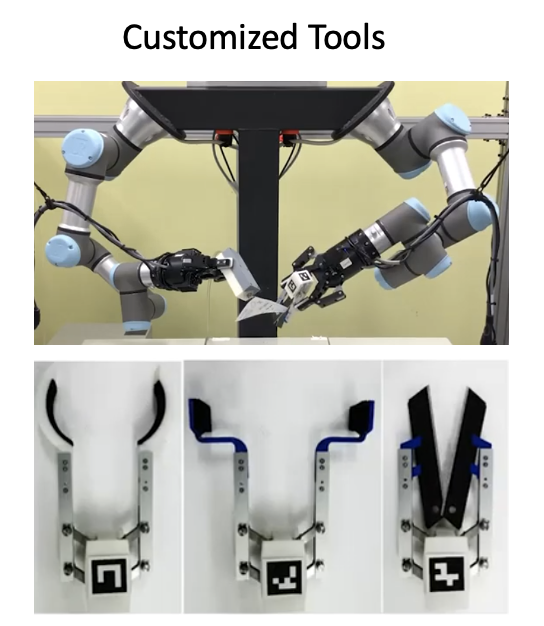
Dexterous hands can be used for handling different tools for different tasks. Since the use of dexterous hand can be out of our reach due its high cost and complexity customizing different fingers for each application is one option which is also widely used in industry. The gripper type remains the same (e.g. parallel) but its finger can be changed based on the task. Another option is customizing the tools needed for the task.
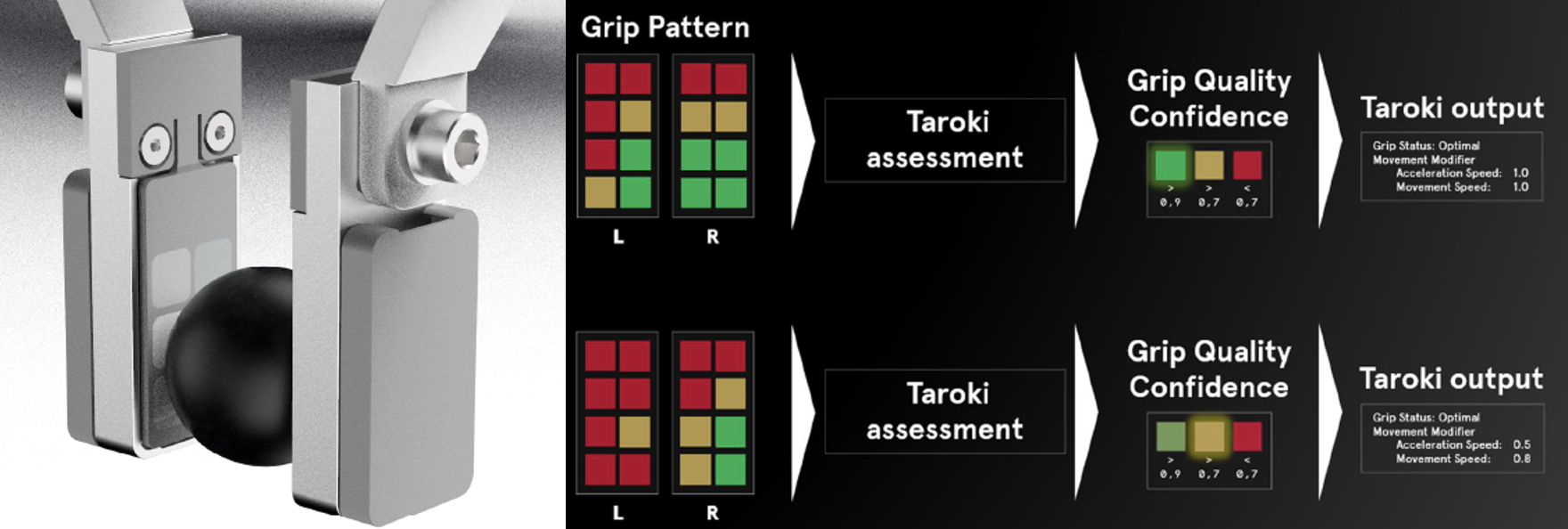
Taroki
- It needs Raspberry Pi communicating with the robot via TCP/IP.
- $1,440 for a limited time.
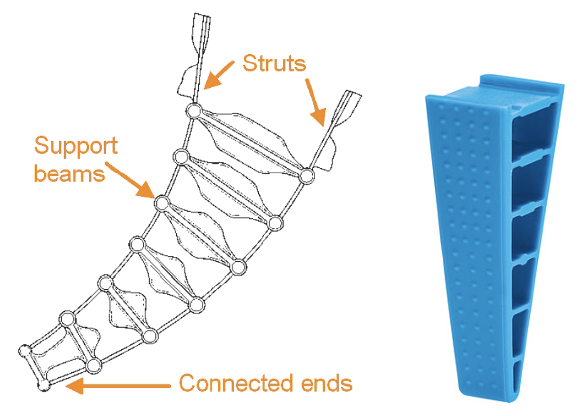
Festo
The FESTO FinFinger is based on the basic principle of how fish’s, especially rays’, fins work. A part using the Fin Ray Effect is made up of two struts or rods, which are joined at their tips forming an acute triangle. It can also be done using three, four or six rods, to add the third dimension. To move the structure, the ends of the rods have to be moved up or down, and the movement gets translated into a smooth circular sideways motion.
FMF Sensor Finger
Attachment finger with interchangeable prism and integrated force measuring, for Weiss Robotics WSG 32 / WSG 50. Enables a precise and highly dynamic force control.

Food Manipulation Case Studies
- mGrip’s food safe, adaptable gripping solutions
- Workpiece Wide variety of food products such as variably sized, freshly made dough balls, steak, cupcakes.
- Task Packaging of food produce, bakery and protein products.
- Solution Food handling at high speed to meet process rate requirements. Ensuring that handling process does not leave tool impressions or other visible imperfections in the very soft dough while meeting the aggressive rate requirements.

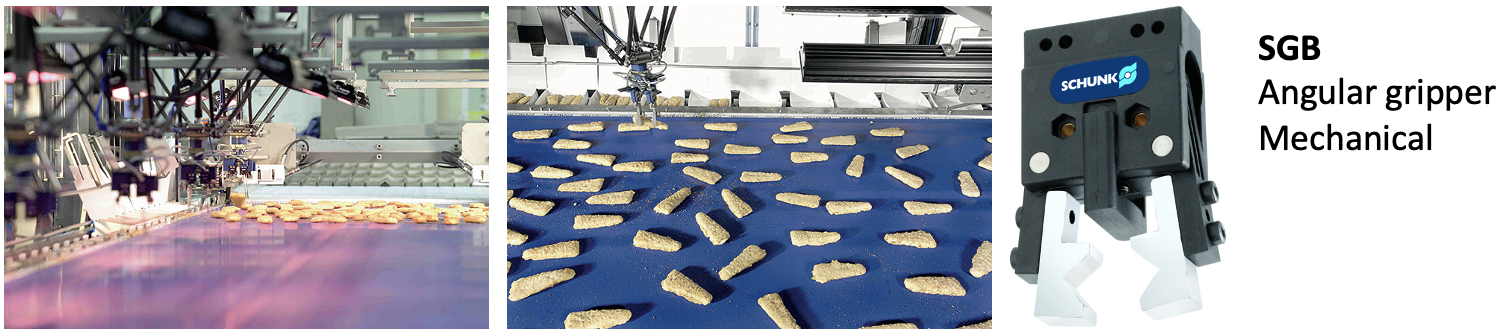
- Gentle gripping of frozen fish products and depositing in boxes
- Workpiece Wide variety of frozen fish products: Fish fingers, fish balls, trapezoidal and oval fish as well as breaded and natural fish plates.
- Task Deep-frozen fish products with various shapes and sizes are to be gently gripped and placed in boxes.
- Solution The product is transported on a conveying belt to the packaging unit. The pick-up position is determined by a robot controller by means of a camera system. The gripper picks up the product and places it into the packaging.
- Babo Arms handing drinks to customers
- Workpiece Different types of cups.
- Task Make tea, clean cups, seal drinks, and hand out drinks.
- Solution Cobot can rotate 360-degree, and move flexibly. With the right gripper, it can carry out repetitive and programmed work near employees such as making tea, cleaning cups, tilting, grabbing, and handing out drinks..
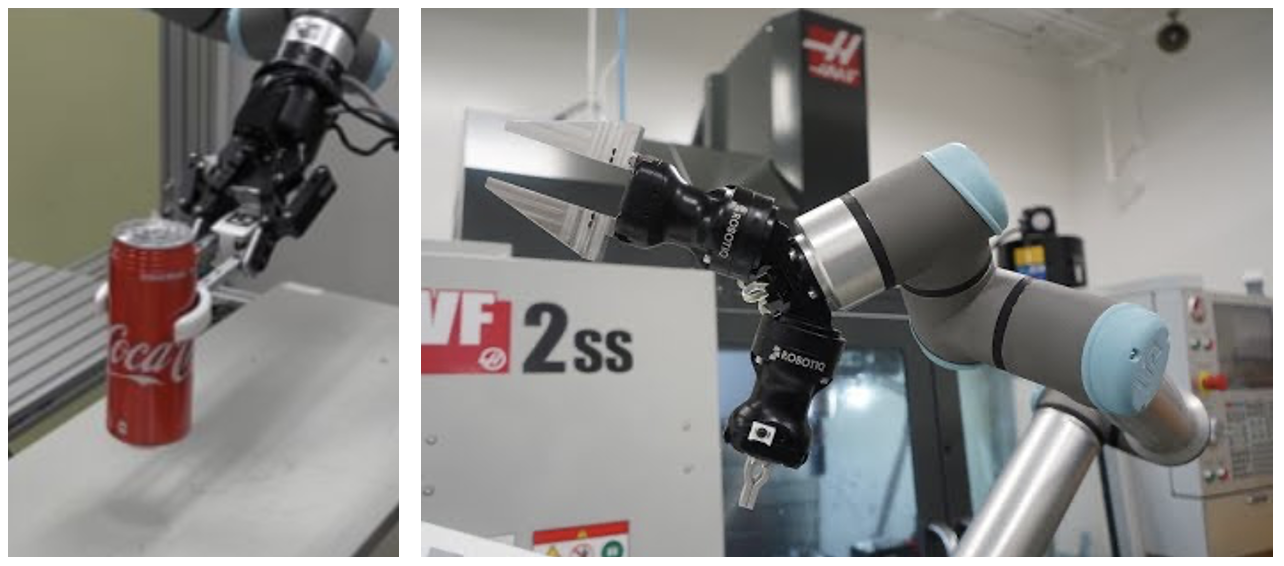
- Subtle movements of baking takoyaki dumplings using Robotiq
- Workpiece Variety of dishes for handling baking materials.
- Task Pour the oil, add the ingredients, and rotate the dumplings to bake until desired doneness.
- Solution Utilizing an image recognition system. The robot works closely with its human counterparts that prepare the ingredients and put toppings on finished products.

- Designing a Mechanical Tool for Robots with 2-Finger Parallel Grippers
- Workpiece Wide variety of objects with different size.
- Task Pick and place.
- Solution A mechanical tool for robots with 2-finger parallel grippers. Like the many tools designed for human hands, the mechanical tool is general and independent from specific robots. Any robot with 2-finger parallel grippers could recognize, grasp, and use the tool. The tool could have lots of variations in the tooltips.

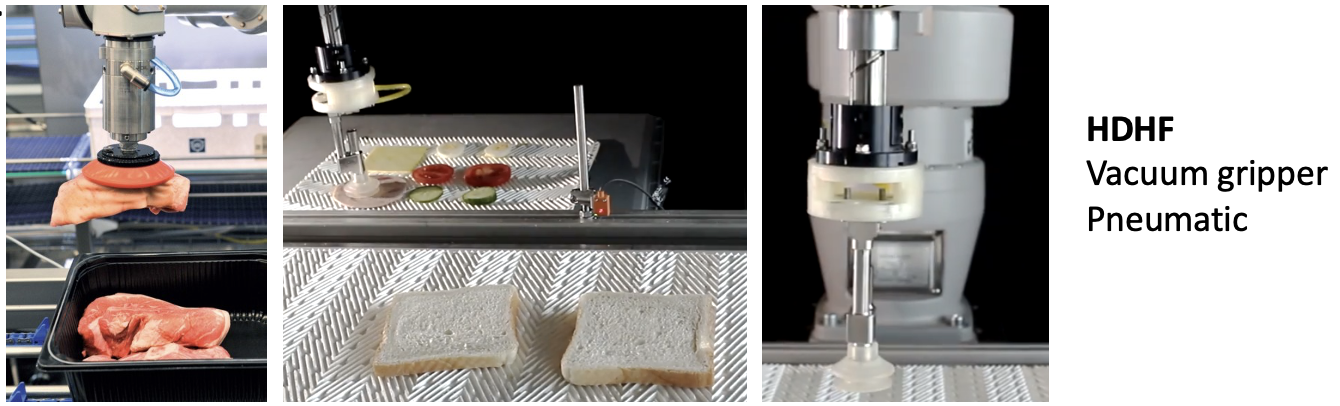
- HDHF Gripping Technology Food-grade Vacuum Gripper
- Workpiece Wide variety of food products: Bread, steaks, tomatoes, cheese slices, etc.
- Task Food products with various shapes and sizes are to be gently gripped and placed in boxes.
- Solution The product is transported on a conveying belt to the packaging unit. The pick-up position is determined by a robot controller by means of a camera system. The gripper picks up the product and places it into the packaging.
Conclusion
For the proposed case studies the more pronounced challenge is adapting to the object rather than conducting the task (i.e. no in-hand manipulation is required). In such cases tool/finger change is considered or a dual gripper setup is used. If changing tools is not a feasible solution modifying the tools to make them easy to be handled by parallel grippers is considered. Still investigating and also waiting for more info from the following companies:
- OnShape
- SoftRobotics
- HDHF Gripping
- Schunk Sensor Finger
- Festo fingers
Weiss Robotics WSG 32-068- is a German-made high quality parallel gripper which different fingers can be attached to it. Since, the finalized product is going to be shipped for a dual-arm robot, utilizing different grippers (i.e. parallel with different types of fingers or vacuum) can be a practical approach. Festo fingers can passively adapt to the object’s shape and it is gentle to different objects such as fragile dishes. Taroki and FMF fingers provide contact force sensing ability for the gripper. Other customized design can also be considered to be attached to the gripper or grasped by the gripper.
